位置傳感器技術(shù) 感知世界的精密之眼
在自動化、智能制造、機器人技術(shù)和物聯(lián)網(wǎng)飛速發(fā)展的今天,位置傳感器作為感知物理世界位置與運動狀態(tài)的核心元件,扮演著不可或缺的角色。它如同系統(tǒng)的“眼睛”,精確地捕捉和反饋物體的位移、角度、距離等信息,是實現(xiàn)精準(zhǔn)控制、智能決策的基礎(chǔ)。
一、位置傳感器的核心原理與類型
位置傳感器種類繁多,其工作原理各異,主要可分為接觸式與非接觸式兩大類。
- 電位器式(接觸式):這是一種經(jīng)典且結(jié)構(gòu)簡單的傳感器。通過滑動觸點在電阻軌道上的移動來改變輸出電壓,從而對應(yīng)不同的位置。其優(yōu)點是成本低、原理直觀,但存在機械磨損、壽命有限、分辨率不高等缺點,常用于對精度和壽命要求不高的場合,如音量旋鈕、游戲手柄搖桿。
- 電感式與電容式(非接觸式):
- 電感式:利用電磁感應(yīng)原理,通過檢測線圈電感量的變化來感知金屬目標(biāo)物的接近或位移。其抗干擾能力強,對環(huán)境要求低(油污、灰塵),廣泛應(yīng)用于工業(yè)自動化中的位置檢測和限位。
- 電容式:基于極板間電容隨距離或覆蓋面積變化的原理。它對所有材料都有響應(yīng),靈敏度高,常用于精密測量、液位檢測以及觸摸屏技術(shù)。
- 光電式(非接觸式):利用光的特性進行檢測,包括對射式、反射式和漫反射式。通過判斷光路是否被物體遮擋或反射光強度變化來確定位置。光電編碼器是其高端應(yīng)用,通過光柵盤與光電接收器將旋轉(zhuǎn)角度或線性位移轉(zhuǎn)化為數(shù)字脈沖信號,具有極高的精度和響應(yīng)速度,是伺服電機、數(shù)控機床的核心部件。
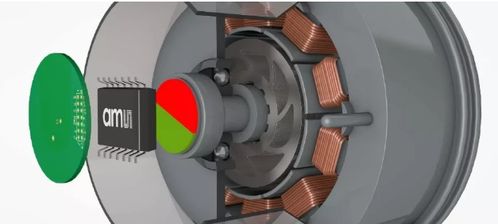
- 磁敏式(非接觸式):基于霍爾效應(yīng)或磁阻效應(yīng)。當(dāng)磁性目標(biāo)物接近時,傳感器內(nèi)部的磁場發(fā)生變化,從而輸出電信號。霍爾傳感器結(jié)構(gòu)堅固、體積小、壽命長,廣泛應(yīng)用于無刷電機換相、汽車節(jié)氣門位置、行程開關(guān)等。
- 新型與高精度傳感器:
- 磁柵與光柵尺:分別利用磁性標(biāo)尺或光學(xué)玻璃尺上的刻線,通過讀取頭產(chǎn)生正弦波信號,經(jīng)電子細分后可達到微米甚至納米級的分辨率,是高端數(shù)控設(shè)備和精密測量儀器的標(biāo)配。
- 激光位移傳感器:利用激光三角測量法或時間飛行法(ToF),能實現(xiàn)非接觸、遠距離、高精度的測量,在尺寸檢測、三維輪廓掃描等領(lǐng)域優(yōu)勢明顯。
- 慣性測量單元(IMU):融合加速度計和陀螺儀(有時包括磁力計),通過積分運算來推算物體的姿態(tài)和位置變化,是無人機、機器人、VR/AR設(shè)備實現(xiàn)自主導(dǎo)航與姿態(tài)穩(wěn)定的關(guān)鍵。
二、關(guān)鍵技術(shù)參數(shù)與選型考量
選擇合適的傳感器需綜合考慮以下參數(shù):
- 測量范圍:傳感器能有效工作的最大距離或角度。
- 精度與分辨率:精度指測量值與真值的接近程度,分辨率是傳感器能分辨的最小變化量。高精度應(yīng)用需兩者俱佳。
- 線性度:輸出與位移之間關(guān)系的直線性程度,誤差越小越好。
- 重復(fù)精度:在同一位置多次測量結(jié)果的一致性,對自動化流程至關(guān)重要。
- 響應(yīng)時間/頻率:傳感器對位置變化的反應(yīng)速度。
- 輸出信號:模擬量(電壓、電流)、數(shù)字量(脈沖、總線協(xié)議如SSI、BiSS、EtherCAT等)。數(shù)字輸出抗干擾能力更強,便于集成。
- 環(huán)境適應(yīng)性:包括防護等級(IP等級)、耐溫性、抗振動沖擊能力、對電磁干擾的免疫力等。
- 安裝方式與尺寸:需匹配機械結(jié)構(gòu)的設(shè)計空間。
三、核心應(yīng)用領(lǐng)域
位置傳感器已滲透到現(xiàn)代工業(yè)與生活的方方面面:
- 工業(yè)自動化:機床刀頭定位、機器人關(guān)節(jié)角度反饋、傳送帶物料位置檢測、氣缸活塞桿行程控制。
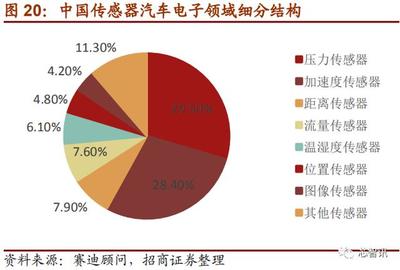
- 汽車工業(yè):油門踏板位置、變速箱選擋桿、電動座椅與后視鏡調(diào)節(jié)、懸架高度監(jiān)測、自動駕駛中的環(huán)境感知(激光雷達、毫米波雷達本質(zhì)也是位置感知)。
- 消費電子:智能手機中的陀螺儀與加速度計(實現(xiàn)橫豎屏切換、計步)、游戲機操縱桿、無人機飛控。
- 航空航天:飛行控制面(副翼、方向舵)位置反饋、起落架收放狀態(tài)監(jiān)測。
四、發(fā)展趨勢與挑戰(zhàn)
位置傳感器技術(shù)正朝著以下方向發(fā)展:
- 智能化與集成化:傳感器本身集成微處理器,具備自校準(zhǔn)、自診斷、溫度補償及初步信號處理功能,并通過IO-Link等智能接口實現(xiàn)參數(shù)遠程配置與數(shù)據(jù)雙向通信。
- 高精度與微型化:在半導(dǎo)體和MEMS(微機電系統(tǒng))技術(shù)的推動下,傳感器在性能不斷提升的尺寸持續(xù)縮小,功耗降低,為可穿戴設(shè)備和微型機器人創(chuàng)造條件。
- 多傳感器融合:單一傳感器存在局限。結(jié)合視覺、激光、IMU、GPS等多種傳感器信息,通過算法(如卡爾曼濾波)進行數(shù)據(jù)融合,能提供更可靠、更全面的位置與姿態(tài)估計,這是自動駕駛和高級機器人的核心技術(shù)路徑。
- 無線化與網(wǎng)絡(luò)化:隨著工業(yè)無線網(wǎng)絡(luò)(如WIA-FA、5G)的成熟,無線位置傳感器能解決復(fù)雜布線難題,提高系統(tǒng)靈活性,便于構(gòu)建大規(guī)模的傳感器網(wǎng)絡(luò)。
挑戰(zhàn)主要來自于極端環(huán)境下的可靠性(如高溫、強輻射、深海)、成本控制,以及對融合數(shù)據(jù)處理的算法算力要求。
###
從簡單的機械觸點,到精密的激光與光柵,位置傳感器技術(shù)不斷演進,其精度、可靠性與智能化程度直接決定了上層系統(tǒng)的性能邊界。作為連接物理世界與數(shù)字世界的橋梁,它將繼續(xù)在智能制造、智慧交通、精準(zhǔn)醫(yī)療等領(lǐng)域扮演“感知先鋒”的角色,推動各行各業(yè)向更自動化、更智能的未來邁進。
最新產(chǎn)品

多維度位置傳感器技術(shù)解析 從原理到應(yīng)用概覽

平衡罩式液位變送器與位置傳感器的技術(shù)應(yīng)用分析

高精度位置傳感器 為智能設(shè)備賦予精準(zhǔn)定位的科技核心

SAC4PM12MR/3,0-PUR/M12FR 位置傳感器技術(shù)解析與應(yīng)用
上市首日暴漲290%!深度解析國產(chǎn)MEMS芯片第一股敏芯股份與位置傳感器

走近GUC15礦用本安型位置傳感器 濟寧東達機電的高清實拍與功能解析

奧凸輪軸位置傳感器 適用于奧迪A4、A6、A8的型號078905161C與078905161A全面解析

精準(zhǔn)匹配|斯巴魯森林人原裝配件 肇速凸輪軸與曲軸位置傳感器詳解
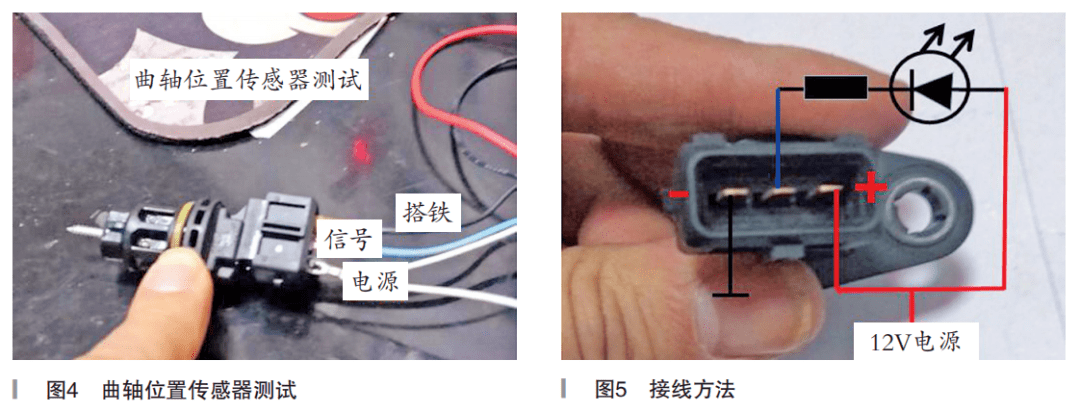
2010年起亞獅跑發(fā)動機啟動困難——曲軸位置傳感器故障維修案例

金杯節(jié)氣門及位置傳感器 選購指南與產(chǎn)品信息全解析